



























TECHNICAL SUPPORT

发布时间: 2026-05-12
存在这样一种需求,即要使得寻常的普通舵机能够如同减速电机那般持续不断地进行旋转,而这是众多的创客以及机器人爱好者均会遭遇的情况。常见的那种9克微型舵机,仅仅借助简单的改造方式伟创动力,便能够从角度控制转变为360度的连续旋转。
在动手之前,要清楚知晓手中所握持的究竟是何种类型的舵机。不同种类的舵机,达成连续运转的途径全然不一样:
普通角度舵机(最常见)
转动范围通常为0~180度或0~270度
内部有物理限位销和角度反馈电位器
需要硬件改造才能连续旋转
出厂即为连续旋转舵机
标注“直流三百六十度”,亦可标注“可控多圈三百六十度”,或者标注“可控速连续三百六十度”。
无需任何改造,通过信号直接控制速度和方向即可
如果你的舵机属于这一类,无需进行下面任何改造操作
总线舵机
采用RS485或CAN总线通信的舵机
部分型号支持通过协议指令切换到连续旋转模式
需查阅对应产品的通信协议手册
当你无法确定自身舵机的类型时,去查看产品规格里“角度范围”那一栏。要是标注着“0~360°”“直流360°”或者“连续360°”,那就表明它原生就支持连续旋转;要是仅仅标注“0~180°”或者类似的有限角度,那就需要进行改造。
最典型的改造对象是最常见的9克微型模拟舵机,以下步骤以它作为示例来讲,操作逻辑同样对多数小型模拟舵机适用。
准备工作
需准备,十字螺丝刀,还有尖嘴钳或者美工刀,以及电烙铁和焊锡(此为可选但推荐的),另外还有热熔胶或者AB胶,再有便是两个同阻值电阻(具体何种阻值的选择见下文)。
第1步:拆开外壳,去除机械限位
将舵机底部的四颗螺丝拧下来,谨慎地把外壳分离,留意齿轮组所处的位置,进行拍照记录,以便后续能够装回。
将输出轴之上的主齿轮给取出来,对其底部加以观察,会存在一个鼓起来的小塑料块,此即为物理限位销,在齿轮转动至极限角度之际,这个鼓起来的物体就会卡住外壳上面的挡块,进而阻止其持续转动。
利用美工刀或者运用尖嘴钳,把这个凸起完全切除殆尽,要保证齿轮转动360度之际不会再度碰上阻滞。这是促使舵机达成连续旋转的首个步骤。
第2步:断开电位器与输出轴的机械连接
舵机内部用于检测当前角度的可变电阻是电位器,它借助旋转轴与舵机输出轴联动,找到电位器,其通常是一个方形的小元件,且有3个引脚。
把电位器拔出固定槽,让它停止随输出轴转动,做完这一步,舵机就不能感知当下角度,控制电路会一直觉得角度未达目标,于是电机就会持续转动。
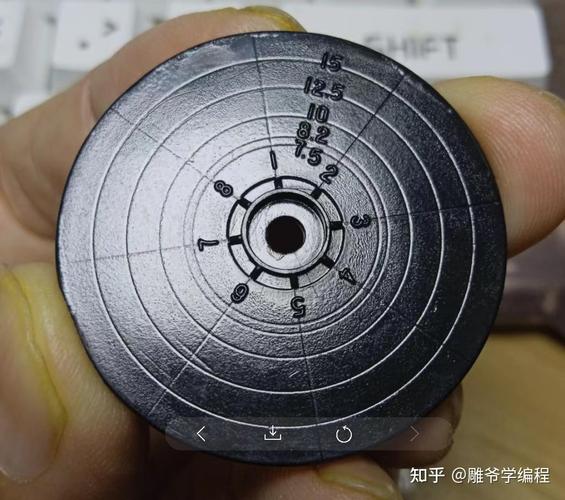
第3步:用电位器调零——最关键的一步
整个改造里重中之重的特定一环是这个。舵机内部的那控制电路,需要一个基准电压用以判断具体的“中点”位置。电位器脱离输出轴之后,得要用手动方式把它精确调到中点之处,不然的话,舵机一上电之后就会自行不停地转动,又或者通电之后停住不动但发出控制信号时转速呈现严重不对称的状况。
操作方法如下:
1. 把电位器再度焊接进电路中,要是先前已经拆卸下来的话,接着将舵机跟测试器相连接,或者连接到接收器那里,然后给出中位信号,此信号脉宽大约为1500μs。
2. 用小螺丝刀缓慢旋转电位器,直到电机完全停止转动
3. 电机停止的位置就是电位器的中点位置
4. 在电位器的旋钮之上,滴加一滴热熔胶,或者是AB胶,把它进行完全的固定,以此来防止在后续使用期间伟创动力舵机,因为震动而出现偏移。
要是条件许可,推选用两个相同电阻值的固定电阻换成电位器,去测量电位器的总的电阻数值,一般是在5kΩ左右,接着焊接两个阻值相等的固定电阻构成分压电路,连接到电位器原本的三个引脚所在位置,让中间引脚恰好得到二分之一的电压,这种办法一劳永逸,比胶固电位器更具稳定性。
改造完成后,舵机的行为完全改变:
中位信号(约1500μs脉宽):电机停止
信号大于中位:电机正向旋转,偏离越大转速越快
信号小于中位:电机反向旋转,偏离越大转速越快
这时,舵机没办法再做位置控制了,仅能够控制旋转方向以及速度。并且,整个调整区间比较窄,实际上有效的脉宽范围一般是在1300至1700μs之间,超出这个范围的指令是不会有额外效果的。
通电后不转或乱转
检查电位器中点是否调好,重新进行调零操作
确认齿轮组安装正确,没有被卡住
检查接线是否松动
正反转速度不一致
电位器中点偏移,重新精细调整
这是手工调零最常见的偏差现象,调整时多反复测试几次
转动无力
检查齿轮组是否啮合过紧,适当松一下外壳螺丝
在那些需要较大扭矩的情景当中,角度舵机经过改造之后的扭矩呈现情况,一般而言是比不上专用减速电机的,这属于正常的状况。
噪音异常或抖动
电位器接触不良,检查焊点是否牢固
若使用了固定电阻替代方案,确认电阻值匹配准确
那适用于创客实验以及低负载场景的改造方案存在着这样一种情况,倘若对于精度、扭矩或者稳定性有着比较高的要求,更为合理的做法便是直接去选用原生支持连续旋转的舵机,又或者是使用带有编码器的减速电机再加上驱动板的方案。改造过后的舵机丧失了位置反馈能力,没办法作为精确的速度控制单元来使用,这可是要知晓的一种取舍。
普通舵机连续运转的核心操作仅有三步,分别是:去除机械限位、将电位器的连接断开、把电位器调零之后固定。其中,电位器调零是整个改造能否成功的关键点,反复进行调试,一直到电机在中位信号的情况下彻底静止才行。要是你仅仅是临时用来测试,或者处于低负载场景下使用,那这个方案极具可行性;要是项目对于精度有着更高的要求,那么建议去选择原生连续旋转舵机,以此获取更为可靠的性能表现。























