



























TECHNICAL SUPPORT

发布时间: 2026-05-12
当你头一回碰到机器人或者自动化设备之际,极易将“舵机”跟“电机”搞混,缘由在于它们看上去皆是通电之后会转动的部件。可是从工程控制的层面来讲,它们的核心差别特别明晰:电机乃是纯粹的旋转动力源,而舵机是一组整合了电机、减速器以及控制电路、能够精准控制角度的伺服驱动系统。此文会为你明确拆分两者的本质区别、选型逻辑以及常见疑问,便利你确切理解并运用这两个关键部件。
欲切实领会两者间的差异,最为径直的办法乃是于定义、结构以及控制这三个维度展开对比分析。
定义与角色
常见的电机宽泛的涵盖直流电机呀、步进电机那些呢等于是“执行单元”伟创动力舵机,它的职责在于把电能转变成旋转的动能,马达仅仅有两根电源线,一旦接通电源便迅猛地达到全速的旋转状态,一旦切断电源便立刻停止运转,其性质决定它自身并不具备位置感知或者反馈的能力。
舵机属于“位置伺服系统”,专门用以精确控制旋转角度,它于小型封装当中集成着电机、齿轮组、控制电路以及位置传感器,借由一根信号线来接收指令,自行进行驱动并锁定至指定角度。
典型构造差异
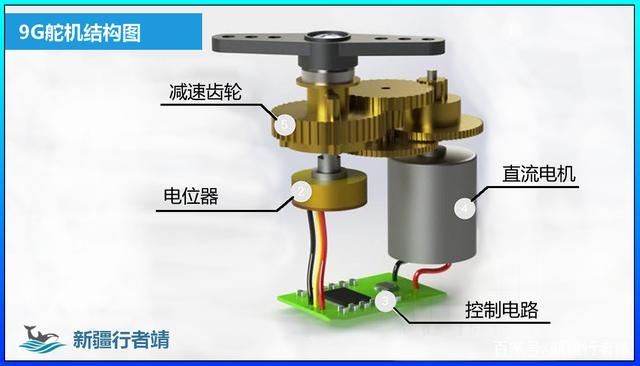
拿一个平常常见的专门用于遥控的舵机来说,当把它的外壳拆卸开来后,你能够看到有四部分,一部分是一个体积不大的直流电机伟创动力,一部分是一组能够把高转速转化制成大力矩的用塑料或者金属制成的齿轮组,一部分是一块用来接收指令的微型电路板,还有一部分是一个能够测量输出轴角度的电位器。然而对于一个处于普通状态的直流电机,在把它拆开之后,仅仅能够看到转子、定子、换向器以及轴承,其结构可要简单许多。
控制方式的天壤之别
你要实现以脉宽调制也就是PWM的方式,通过控制电压高低达成运转速度调节进行普通直流电机的操控,那就得另外构建H桥驱动电路用来辅助,而若想确切知晓电机转动了多少圈,就一定得在外部连接编码器才行。
非常简易地控制舵机的方式是,从单片机或者接收机引出三条线,分别是电源正、电源负、信号线。发给舵机一个脉冲信号,这个脉冲信号的周期是20毫秒,脉宽处于0.5毫秒至2.5毫秒之间变化,如此一来舵机就会自行走到对应角度并且全力保持。举例来说,1.5毫秒脉宽通常对应的是90度位置。
当你要去选择驱动方案之时,按照你的设计目标,去对照以下这些特征,如此便能够快速做出判断。
需要舵机的典型场景
其设计目标为,走到一个特定位置并予以保持,并且行程存在限制,一般处于0至180度或者0至270度的范围,在力学方面对于瞬态力矩有着较高要求。例如:
机器人关节:要求手臂锁定在指定高度,不能因重力而下垂。
出现转向情况:针对遥控车或者固定翼航模来进行方向盘面的控制,当进行打杆操作的时候,舵面会到达指定的角度,在松开手轮之后,它能够自动地回中并且实现锁紧。
阀门实施控制,管道上面的阀门,要精准地开启达到了百分之三十,或者是百分之四十五,并且要对抗流体压力从而维持住开度。
需要电机的典型场景
那么你的设计目标呢,是那种“连续的、长时间的旋转运动”,或者便是“极高转速的运动”,就像这样:
来自动力的源头,像那种四轴无人机的旋翼,还有遥控车的驱动轮,以及桌面风扇的扇叶,它们都有着持续不断的高速转动需求。
将连续旋转转变成直线运动,借助丝杆或者皮带进行配合,这就是直线传动,像3D打印机其中的送料以及平台移动就是这样。
在低成本的状况下进行速度控制,就像小型的水泵以及抽风机那样,仅仅关注“转动的速度有多快”,而对于“停止在哪个位置”并不在意。
有没有一个常见疑问,那就是可不可以用复杂的步进电机或者伺服电机系统去替代舵机?答案是能够代替,然而成本却要高很多的。为什么是这样,因为一个标准舵机已经集成了驱动逻辑出来,可要是采用同等力矩的步进电机方案的话,那就需要额外去采购驱动器,还要采购编码器,以及编写闭环控制程序才行的。所以,在有小空间,以及低总成本,还有简化逻辑这样的要求之下,舵机才是完成角度锁定的首选的。
我能让电机像舵机那样停住吗?
okay,不过,得自己去构建一套形成封闭回路的伺服系统。你得给电机装上编码器,配置控制是PID这样类型的,然后用单片机去调整脉冲宽度调制也就是PWM输出进而依时刻纠正位置出现的偏差。一旦发生断电这种状况,这个系统停工,电机就没办法维持住力矩了。
舵机能像普通电机那样360度连续转吗?
有一种特定类别的“360度舵机”是可行的,然而它已被转变为变速装置而非位置装置,这种舵机反馈电位器处于固定状态,控制信号并非调节角度而是调节电机转速以及方向,没办法再控制精准的停止位置,普通的航模定位舵机绝对不可以直接改造成连续旋转,不然会损坏内部机械硬限位块以及电位器。
舵机在极力锁定时,嗡嗡响是怎么回事?
这属于平常状况声音源自内部控制电路于极高频率下在微小位置偏差之间反复对电机进行调节为切实达成将输出轴精准锁定于指令位置当所施加的力越大那么这种呈现为高频调节形式的电流声便会越发显著倘若舵机处于静止状态且不存在外力作用情况时依旧出现严重啸叫情况那么极有可能是电位器存在脏污现象或者齿轮出现卡涩状况。
供电上的注意事项
单片机IO口不可以直接用来给舵机进行供电,舵机属于瞬间大电流的器件,在堵转的时候有可能会在瞬间消耗安培级别的电流,极其容易把逻辑电路电压拉低,进而导致单片机复位或者通信中断,要为舵机准备单独的、有充足余量的电源回路,并且要和单片机控制电路共地。
再次着重强调核心观点:电机它属于基础的旋转部件,舵机则是那种带有位置控制的集成系统。在你进行设计期间,对于“连续旋转”以及“定位锁定”的需求,还有对于“系统复杂度”的接受能力,这些实际上决定了最终的选择。
行动建议:
要是你正着手进行实物搭建规划,那就可以先从一个小尺寸的标准舵机以及空心杯小电机开始入手,然后依据此文内容予以分别接电,并且施加负载,亲身去感受“发脉冲锁角度”以及“调电压调速度”的差异所在。这样的实践能够助力你构建起有关执行器特性的稳固直觉。明白了这两者的界限之后,你在设计自动化装置之际,就能精准地挑选出最为经济、最为可靠的运动方案。























