本网站使用Cookie来确保您获得最佳体验。继续浏览本网站即表示您同意我们使用Cookie。了解更多关于Cookie的使用和隐私政策。
产品中心
舵机
无刷电机
减速电机
定制驱动模组
高性能无刷舵机
高压空心杯舵机
智能机器人舵机
数码标准舵机
微型迷你舵机
扁舵机 矮舵机
超大扭矩舵机
IP67防水舵机
485&CAN总线舵机系统
EC 无刷电机
无人机动力电机
准直驱机器人关节电机
无刷云台电机
无刷轮毂电机
行星减速电机
正齿减速电机
无刷丝杆电机
定制减速电机
智能家居舵机
消费电子舵机
车载运动机构
工业自动化电机
医疗器械电机
解决方案
"创新是企业的生命,伟创动力在未来将会不断为社会提供更多伟大的创新服务!"
智能家居
无人机
机器人
汽车电子
消费电子
工业自动化
科学农业
新闻资讯
"现在是一个井喷式科技时代,伟创动力也要时刻紧跟时代的脉搏,不断为未来科技做好准备!"
客户案例
展会活动
企业动态
行业资讯
技术支持
关于我们
“企业和行业都会面临困境和痛点,每个阶段大家既是竞争也是帮衬,时代的脚步需要互相推动!”
认识伟创动力
技术创新
精益智造
品质保障
定制服务
联系我们
English
China-中文简体
English
China-中文简体
取消
产品中心
舵机
高性能无刷舵机
高压空心杯舵机
智能机器人舵机
数码标准舵机
微型迷你舵机
扁舵机 矮舵机
超大扭矩舵机
IP67防水舵机
485&CAN总线舵机系统
无刷电机
EC 无刷电机
无人机动力电机
准直驱机器人关节电机
无刷云台电机
无刷轮毂电机
减速电机
行星减速电机
正齿减速电机
无刷丝杆电机
定制减速电机
定制驱动模组
智能家居舵机
消费电子舵机
车载运动机构
工业自动化电机
医疗器械电机
ODM/OEM 服务
解决方案
智能家居
无人机
机器人
汽车电子
消费电子
工业自动化
科学农业
新闻资讯
客户案例
展会活动
企业动态
技术支持
工程师资源
舵机
无刷电机
减速电机
定制驱动模组
产品百科
概述
教程
制造工艺
故障排查FAQ
机械
硬件
软件
技术洞察
微型舵机
无刷电机
机械
关于我们
认识伟创动力
技术创新
精益智造
品质保障
定制服务
联系我们
首页
>
行业资讯
>
减速电机
Kpower Drive Product Matrix
Servo | BLDC | Gear Motor | Custom Drive Unit
More Details
Leading R&D Capabilities
End-to-end drive module solutions with customization for end-user applications.
More Details
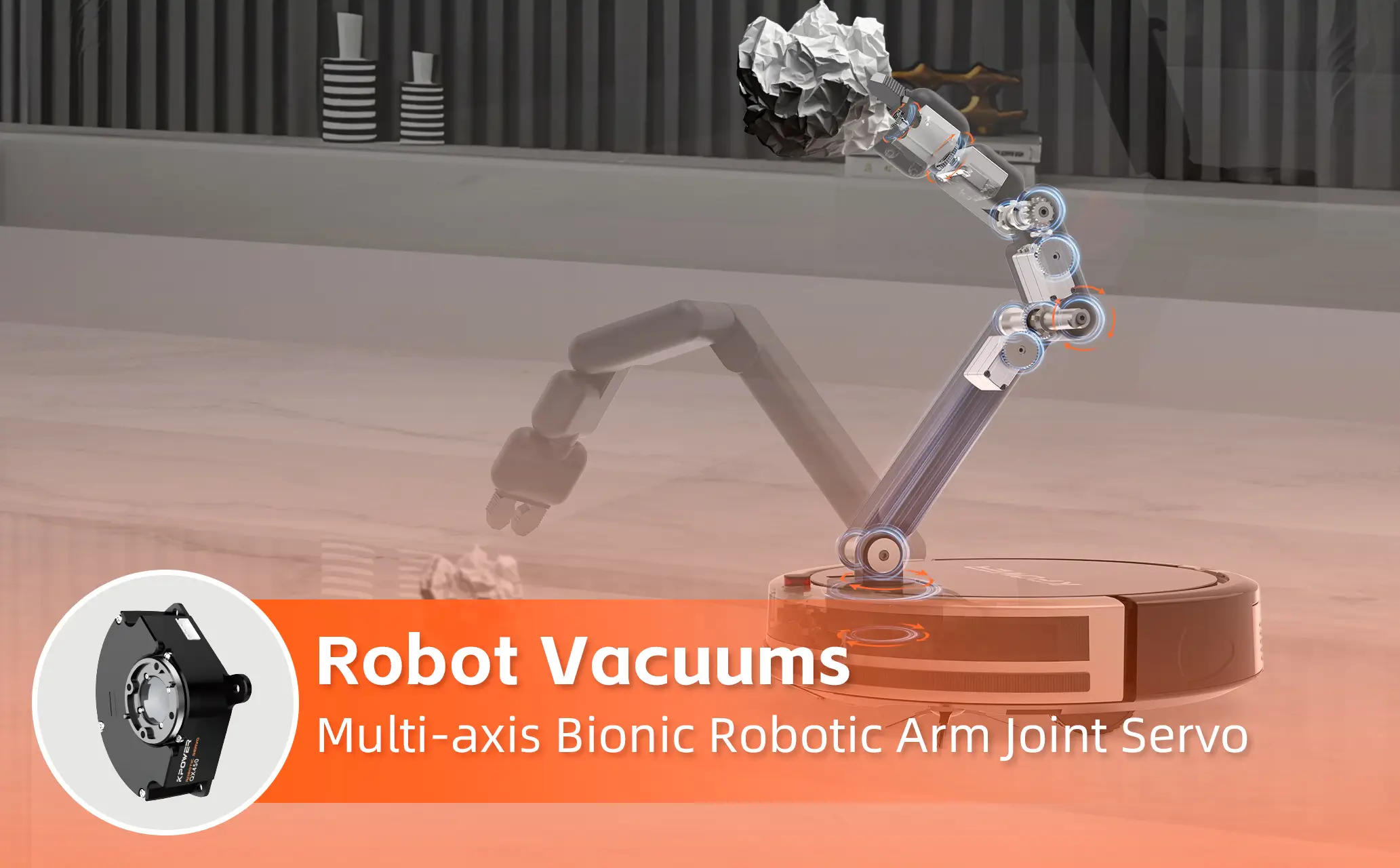
Smart Vehicle Cabin
Micro Drive Systems in the central control screen, ceiling screen, cockpit speaker, DMS/OMS camera
More Details
今日焦点
搜索
舵机
无刷电机
减速电机
定制驱动模组
舵机吱吱响?齿轮异响原因与解决
待拆解之后在减速齿轮表面发现了明显划痕,此种情况典型地是由于齿轮间隙过大或者润滑不足引发的。那么更换屏蔽线或者加装滤波电容便能够将嗡嗡声问题予以解决。还得进一步去瞧瞧舵机的其他部件有没有异常状况。这么做能够非常有效地降低齿轮出现磨损以及产生异响的概率。进而致使舵机出现异常抖动的情...
2026-05-29
舵机连接接收器接线图解,一看就懂(附视频教程)
通常会连接到接收器的正极(+)接口那里。并且它连接到接收器的信号(S)接口。三、实际连接步骤演示错误地把舵机信号线连接在了接收器电源针脚上。连接完成后,先不要马上装车,请先进行通电测试:五、如何观看最佳图解与视频教程另外也要搜索“遥控舵机接线标准”。
2026-05-29
树莓派控制舵机C++代码教程
而是因为C++代码之中欠缺了关键的时序控制抑或是引脚配置。使得你能用C++在树莓派上精准地控制舵机旋转到任意的角度。连接树莓派GPIO二、核心原理:PWM与舵机角度舵机旋转角度由高电平持续时间来决定。三、编写C++控制程序使用树莓派的PWM0通道,对应GPIO18
2026-05-28
碧蓝航线高性能舵机图纸速刷攻略
需要数量众多的“高性能舵机图纸”。核心结论:最快出图纸的关卡尽可能地去加大其中机动以及耐久性等相关加成数字的数值。这是由于径直买油在性价比方面相对而言更低一些。“为什么我刷了10把没有一张图纸?大部分活动图不产高性能舵机图纸,请以主线图为主。获取高性能舵机图纸的唯一有效办法乃是持...
2026-05-28
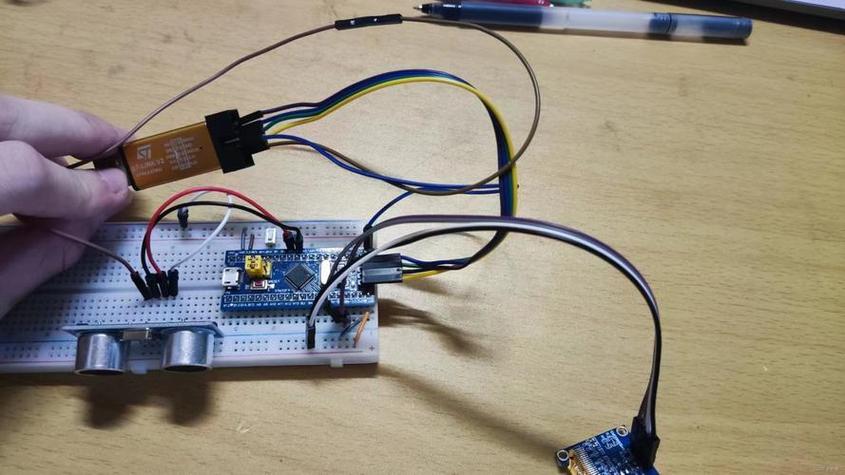
超声波控制舵机 保持角度不动 怎么实现
超声波控制舵机保持角度:实现方法与常见问题仅仅持续把对应目标角度的PWM信号发送给舵机就行。,实现“超声波触发→舵机转到角度并保持”的完整流程如下:舵机始终持续维持在目标角度的情形。问题一:舵机抖动或无法保持角度或者采用带有使能控制的舵机驱动模块。触发条件满足,舵机转到90°并保...
2026-05-28
舵机PID控制仿真软件下载,手把手教你选对装好
一、为什么需要舵机PID控制仿真软件?调试时间紧,怕烧舵机三、如何选择适合你的舵机PID控制仿真软件?专用舵机仿真小工具(入门级)四、舵机PID控制仿真软件下载与安装步骤(以MATLAB/Simulink为例)Q2:仿真时PID参数明明很好,上机后舵机却抖得厉害?
2026-05-28
船舶舵机失灵应急措施怎么写?三步搞定标准流程
第一步:立即识别故障类型并启动初始响应或者运用“双车差动”这种方式(针对双螺旋桨船而言)从而保持船舶的基本航向。若应急操舵系统无法立即恢复,机舱同步执行以下操作:第三步:编制标准化应急措施文件认真核查你船原有的《舵机失灵应急程序》。那么一定要在上本船舶航次终结之前把它们补充完备到...
2026-05-28
1
2
3
搜索
热门文章
伟创动力荣获央视报道关注 | 微型舵机赋能机器人产业出海
2026-03-24
伟创动力邀您参展2026中国家电及消费电子博览会(AWE)
2026-03-10
2024 Kpower广东省优质高新技术产品
2025-12-24
推荐文章
Kpower入选2025年东莞市首批重点人工智能企业
2025-12-24
Kpower荣获Dreame“先锋技术突破奖”
2025-04-22
Kpower获评东莞市工程技术中心
2025-04-15
经典文章
热门标签
转向舵机如何接线在遥控上使用
转动视角功能什么意思
模型舵机安装教程
大功率舵机
舵机pd参数怎么调
模型控制舵机的作用
更换舵机
舵机旋转速度
家用台式电脑报价
智能家居
转向舵机工作原理
可以旋转角度的视频播放器
舵机的作用和特点是什么
舵机调速程序
参数设置舵机怎么设置
舵机转动后为啥会自动返回
舵机工作电压电流
舵机测试仪程序
hp家用台式电脑报价
无人机
为所有产品提供动力单元
联系伟创动力产品专家,为你的产品推荐合适的驱动系统所需部件。
提供需求
发送邮件
在线留言
WhatsApp
+86 0769 8399 3238
kpowerMap